Вопрос:
1. Какие бывают роботы? 2. Каких роботов целесообразно использовать для работы на конвейере автомобильного предприятия? 3. Какое устройство можно считать первым космическим роботом? Какие современные космические роботы вам известны?
Ответ:
Блок 1: Типы роботов и их применение
1. Типы роботов:
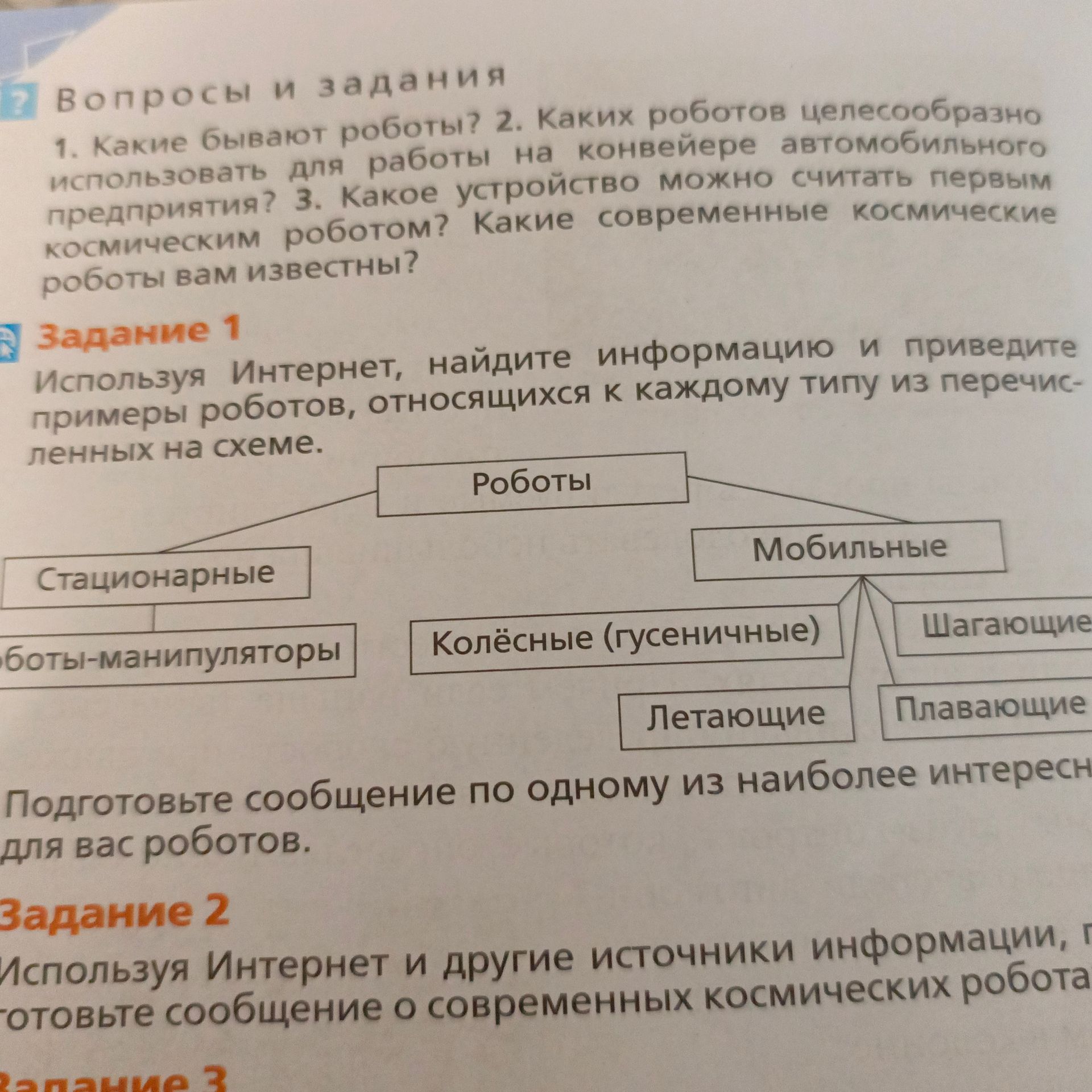
- Стационарные роботы: Роботы, которые закреплены на одном месте и выполняют определенные задачи. Примером являются роботы-манипуляторы, которые используются для перемещения, сборки или сварки деталей.
- Мобильные роботы: Роботы, способные перемещаться. Они могут быть колёсные (гусеничные), шагающие, летающие или плавающие.
2. Роботы для автомобильного конвейера:
На автомобильном конвейере наиболее целесообразно использовать стационарных роботов-манипуляторов. Они идеально подходят для выполнения повторяющихся, точных и тяжелых операций, таких как сварка, покраска, сборка и перемещение компонентов.
3. Первый космический робот и современные примеры:
Первым устройством, которое можно считать космическим роботом, часто называют «Луноход-1», запущенный Советским Союзом в 1970 году. Это был дистанционно управляемый аппарат, предназначенный для исследования поверхности Луны.
Современные космические роботы:
- Марсоходы (например, Curiosity, Perseverance): Исследуют поверхность Марса, собирают данные о геологии и атмосфере, ищут признаки жизни.
- Космические телескопы (например, Хаббл, Джеймс Уэбб): Хотя и не роботы в традиционном понимании, они являются автоматизированными аппаратами, выполняющими сложные задачи по наблюдению за Вселенной.
- Спутники-инспекторы: Используются для обслуживания и ремонта других космических аппаратов.
- Роботизированные руки на МКС (например, Canadarm2): Помогают в сборке, обслуживании станции и работе в открытом космосе.
Похожие
- Задание 1. Используя Интернет, найдите информацию и приведите примеры роботов, относящихся к каждому типу из перечисленных на схеме. Подготовьте сообщение по одному из наиболее интересных для вас роботов.
- Задание 2. Используя Интернет и другие источники информации, готовьте сообщение о современных космических роботах.
