10. На бесконечном поле есть горизонтальная и вертикальная стены. Правый конец горизонтальной стены соединен с верхним концом вертикальной стены. В каждой стене есть ровно один проход, точное место прохода и его ширина неизвестны. Робот находится в клетке, расположенной непосредственно под горизонтальной стеной у ее левого конца. На рисунке указан один из возможных способов расположения стен и Робота (Робот обозначен буквой «Р»). Напишите для Робота алгоритм, закрашивающий все клетки, расположенные непосредственно ниже горизонтальной стены и левее вертикальной
Ответ:
Алгоритм для Робота:
Цель: закрасить все клетки непосредственно ниже горизонтальной стены и левее вертикальной стены.
Исходные данные:
- Робот находится в клетке под левым концом горизонтальной стены.
- Есть горизонтальная и вертикальная стены с неизвестными проходами.
Алгоритм:
- Движение вдоль горизонтальной стены:
- Двигаться вперед (вправо) до тех пор, пока не встретится вертикальная стена (или препятствие, указывающее на конец поля, если оно конечное).
- На каждом шаге, перед тем как двигаться вперед, проверить, есть ли клетка прямо под роботом.
- Если клетка под роботом свободна, закрасить её.
- Если клетка под роботом занята (стеной), то это означает, что робот достиг вертикальной стены (или края поля).
- Движение вниз:
- После того как робот упрется в вертикальную стену (или достиг края поля, двигаясь вправо), он должен спуститься вниз.
- Спускаться вниз, закрашивая каждую клетку, до тех пор, пока не встретится нижняя граница поля или другая непреодолимая преграда.
- Важно: этот спуск должен произойти только после того, как робот пройдет всю длину горизонтальной стены (или ее видимую часть).
Уточнение:
Так как проходы в стенах неизвестны, алгоритм должен быть универсальным. Робот должен двигаться вправо, пока не упрется в вертикальную стену. В процессе движения вправо, если клетка непосредственно под роботом свободна, он должен ее закрасить. После встречи с вертикальной стеной, робот должен спуститься вниз.
Предполагаемые команды (для контекста, если бы они были заданы):
- Вперед (двигаться в заданном направлении)
- Вправо (повернуть направо)
- Влево (повернуть налево)
- Вниз (двигаться вниз)
- Закрасить (закрасить текущую клетку)
- ПроверитьКлеткуСнизу() (возвращает true, если клетка под роботом свободна)
- ПроверитьКлеткуСпереди() (возвращает true, если клетка перед роботом свободна)
Пример последовательности команд (гипотетический):
// Движение вправо и закрашивание клеток под горизонтальной стеной
while (ПроверитьКлеткуСпереди())
{
Если (ПроверитьКлеткуСнизу())
{
Закрасить();
}
Вперед(); // Двигаемся вправо
}
// Спуск вниз после достижения вертикальной стены
while (ПроверитьКлеткуСнизу())
{
Закрасить();
Вниз(); // Двигаемся вниз
}
Ответ: Алгоритм заключается в движении Робота вправо вдоль горизонтальной стены, закрашивая каждую клетку непосредственно под собой, если она свободна. По достижении вертикальной стены, Робот должен спуститься вниз, закрашивая все клетки на своем пути.
Похожие
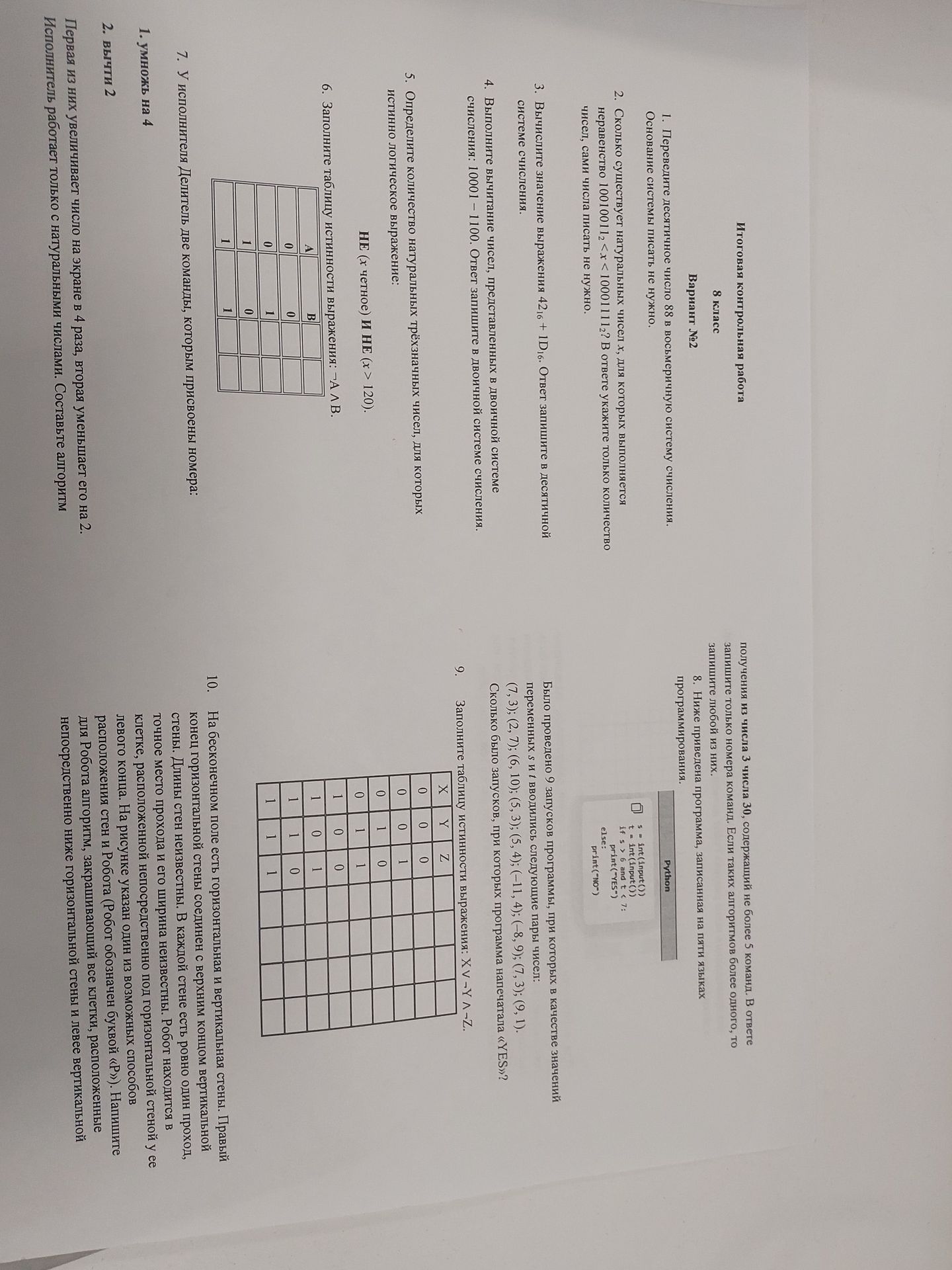
- 1. Переведите десятичное число 88 в восьмеричную систему счисления. Основание системы писать не нужно.
- 2. Сколько существует натуральных чисел х, для которых выполняется неравенство 10010011<sub>2</sub> < x < 10001111<sub>2</sub>? В ответе укажите только количество чисел, сами числа писать не нужно.
- 3. Вычислите значение выражения 42<sub>16</sub> + 1D<sub>16</sub>. Ответ запишите в десятичной системе счисления.
- 4. Выполните вычитание чисел, представленных в двоичной системе счисления: 10001 - 1100. Ответ запишите в двоичной системе счисления.
- 5. Определите количество натуральных трёхзначных чисел, для которых истинно логическое выражение: НЕ (х четное) И НЕ (x > 120).
- 6. Заполните таблицу истинности выражения: «А Л В.
- 7. У исполнителя Делитель две команды, которым присвоены номера: 1. умножь на 4; 2. вычти 2. Первая из них увеличивает число на экране в 4 раза, вторая уменьшает его на 2. Исполнитель работает только с натуральными числами. Составьте алгоритм
- 8. Ниже приведена программа, записанная на пяти языках программирования. Получения из числа 3 числа 30, содержащий не более 5 команд. В ответе запишите только номера команд. Если таких алгоритмов более одного, то запишите любой из них.
- 9. Заполните таблицу истинности выражения: ХѴ-УЛ-7.
